
|
AISpace2 | Main Tools | News | Downloads | Prototype Tools | Customizable Applets | Practice Exercises | Help | About AIspace |
|
|
In a programming language of your choice, implement the top level of the robot controller hierarchy.
Here is one possible solution: input variables: sensor, last_goal output variables: last_goal, goal constants: light_threshold, dark_threshold 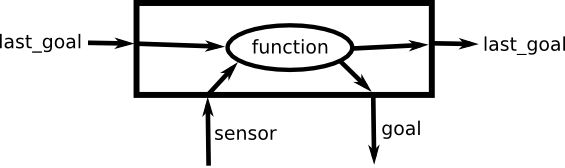
Code:
if (last_goal == true && sensor > light_threshold) {
goal = false;
} else if (last_goal == false && sensor < dark_threshold) {
goal = true;
}
last_goal = goal;
|
| Main Tools: Graph Searching | Consistency for CSP | SLS for CSP | Deduction | Belief and Decision Networks | Decision Trees | Neural Networks | STRIPS to CSP |