
|
AISpace2 | Main Tools | News | Downloads | Prototype Tools | Customizable Applets | Practice Exercises | Help | About AIspace |
|
|
Design a trap that would prevent your robot controller from ever reaching the lamp. There must be a valid path from the robot's starting position to the lamp (which your robot controller will not find).
In the following figure, black regions represent walls: 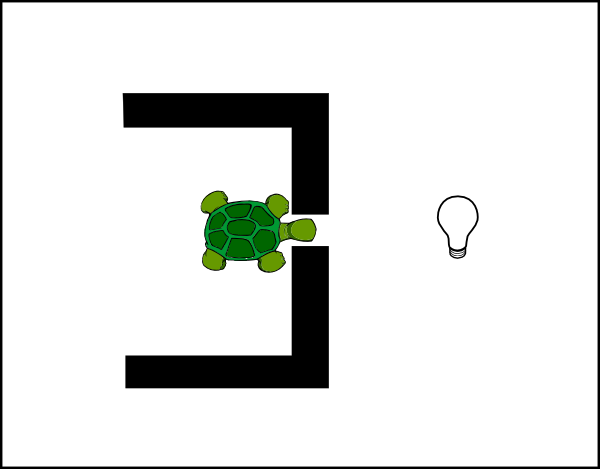
|
| Main Tools: Graph Searching | Consistency for CSP | SLS for CSP | Deduction | Belief and Decision Networks | Decision Trees | Neural Networks | STRIPS to CSP |